

 联系我们
联系我们

近期项目上用了ABB机器人,专门研究了一下机械臂位置的角度偏移,使用jointtarget数据类型信移单个轴使用局限性太大, 本例结合EulerZYX、OlilientZYX另 个指令能对所有个轴进行同时角度偏移,又结合offs偏移指令能对机械臂位置的6个自由度全方位偏移。
像偏移指令,比较好用到的项目应用就是码垛项目和搬运项目,因为像这两个项目的话就是一个在原位置上,然后根据自己的需要向那个方向计算好X、Y、Z轴的大小和方向就OK了。所以还是非常简单的。
下面是常见的偏移函数实例(下面是一个MoveLd的偏移函数)
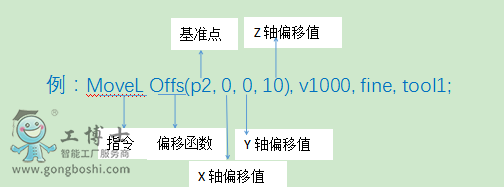
上面的整条指令的含义就是:将机械臂移动至距位置p2(沿z方向)10 mm的目标处
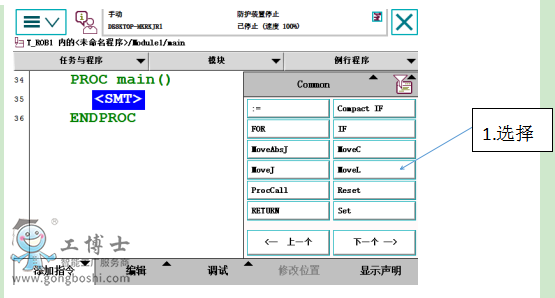
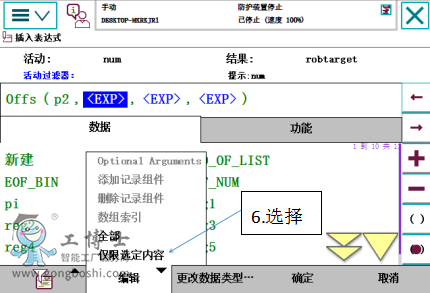
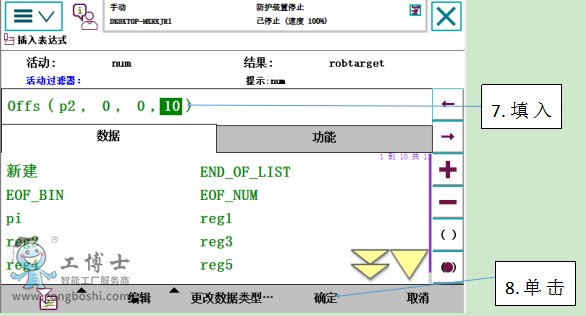
那这个指令怎么在ABB机器人示教器中写出来呢?下面图片中是具体的编程流程



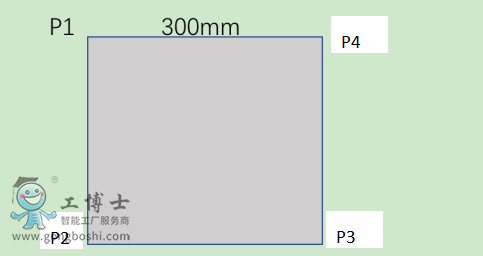
例如:长宽均为300mm的正方形,P1为示教的位置点(偏移基准点)然后根据需要偏移的距离进行偏移。

以上就是对ABB机器人偏移指令的详细讲解,如果还有其它问题可咨询小编。
如还需了解ABB机器人驱动器,ABB机器人伺服电机等更多的配件信息可咨询:ABB机器人配件服务商
